
Microtron ready for refit, 2009
What is a Microtron Robot?
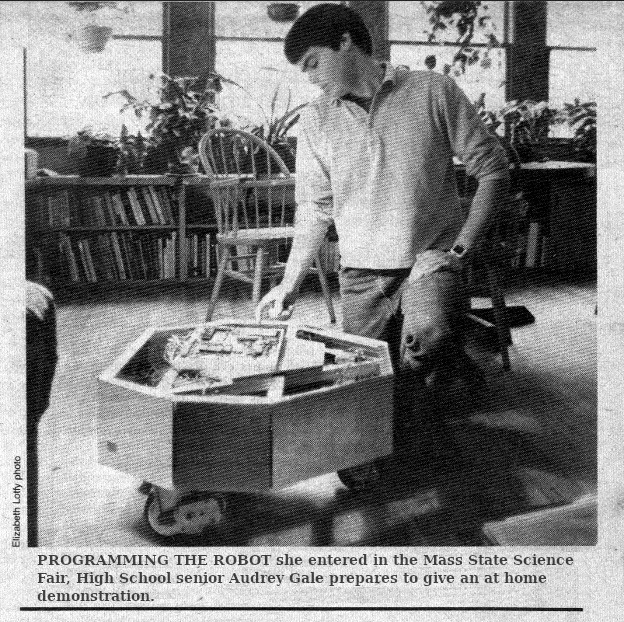
I first learned of “Microtron” in an article from the April 1977 issue of Interface Age. I was inspired to buld a Microtron (or a similar machine) of my own, and later, in 1980, I used Tod Loofbourrow’s book as a guide and began construction of my version of the three-wheeled solid aluminum computer-controlled robot.
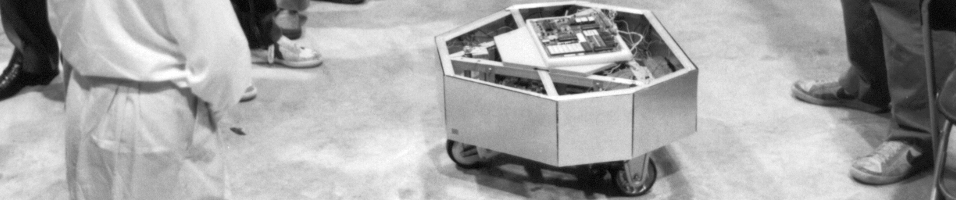
Microtron was run by a single-board 6502-based computer (Synertek’s SYM-1, as opposed to the KIM-1 that Todd had used), programmable via a hex keypad. The robot basically moved around in pre-programmed patterns and was smart enough to back up and avoid objects that it had hit. Todd’s book also described how to add ultrasonic detection but I never made it that far.
From 1984 to 2009, the robot was in storage. I am currently restoring and repairing it, with a plan to update its computer to something current and make some other additions, including adding the long-missing, original ultrasonic detector and circuitry. Eventually, I hope to use the robot as a platform for implementing and exploring some long-standing AI theories that I’ve had.
This site is a combination historical scrapbook, progress journal, and personal notebook for jotting various notes and thoughts as I continue my work.

For the latest updates, visit Microtron’s main page.
 "How to build a computer-controlled robot" (amazon)
"How to build a computer-controlled robot" (amazon) 1977 Interface Age Article (pdf)
1977 Interface Age Article (pdf) ZagrosRobotics
ZagrosRobotics
Hi – this is Tod Loofbourrow. Great to see you got so far on a Microtron. Amazing to see how many of these got built. 20,000 of those books made it to hobbyists bookshelves, and I’m always excited to hear stories of people who got so far along. Continued luck in your exploration of AI, and may your work inspire the next generation of dreamers and tinkerers…
Tod
I’ve decided to engineer replacements for the TM20K370 and TM21K460 Motorized Wheels that Herbach & Rademan used to sell. Basically, at 12V, the wheels (4.5″ in diameter) would move at walking speed. Since the RPM isn’t known, I estimate no more than two feet per second. The startup and stall current was 8 AMPS and the stall torque was a pulling force of 20 pounds. This is all of the info that I have regarding those wheels. I am actively searching for old H&R catalogs to try to glean more specs. The project will be completely open source and currently resides here: https://github.com/TheLittleEngineers/The-Little-Engineers-Replacement-Designs-For-The-TM20K370-and-TM21K460-Motorized-Wheels – it should be noted that if you are building from scratch and will be using different wheels, there is likely no need to build the triangle sections. Simply cutting an 8-sided polygon (use the dimensions provided for the impact sensors to arrive at the length of the sides) and mounting wheels to it should suffice. Rather than the ribbon switches, use five 12x12x7 tact switches with keycaps to construct the impact sensors.